

摘要:,,本文重点解析自主飞行器的设计与控制难题。设计方面,涉及飞行器结构、动力系统和导航系统的创新构建。控制方面,探讨如何克服飞行器在复杂环境下的稳定性和安全性挑战,包括自主决策、智能避障等技术难题。文章旨在为读者提供自主飞行器研发的前沿知识和技术解决方案。
本文目录导读:
随着科技的飞速发展,自主飞行器的研究与应用逐渐成为航空领域的热点,自主飞行器具备自主导航、稳定飞行、智能控制等特点,其设计与控制过程中面临诸多挑战,本文将针对自主飞行器的设计与控制难题进行深入解析,并提出相应的解决方案。
自主飞行器的设计
自主飞行器的设计是一个复杂的系统工程,涉及机械结构、电子系统、控制系统等多个领域,在设计过程中,需充分考虑飞行器的性能要求、安全性、稳定性等因素。
1、机械结构设计
自主飞行器的机械结构设计需满足轻量化、高强度、稳定性等要求,还需考虑空气动力学性能,以降低飞行过程中的阻力,机械结构的设计还需考虑飞行器的可维护性,以便于后续的维修与保养。
2、电子系统设计
电子系统是自主飞行器的核心部分,包括传感器、通信模块、计算单元等,电子系统的设计需具备高度集成、低功耗、高性能等特点,还需考虑电磁兼容性,以确保各电子元件之间的正常工作。
3、控制系统设计
控制系统是自主飞行器的关键部分,负责实现飞行器的自主导航、稳定飞行等功能,控制系统设计需充分考虑飞行器的动态特性,采用先进的控制算法,以实现飞行器的精确控制。
自主飞行器的控制难题
在自主飞行器的控制过程中,面临诸多难题,如建模精度、抗干扰能力、实时性等方面。
1、建模精度问题
自主飞行器的控制是建立在数学模型基础上的,实际飞行环境复杂多变,建立精确的飞行模型是一项挑战,建模误差可能导致飞行器的控制精度降低,甚至引发安全隐患。
2、抗干扰能力问题
自主飞行器在飞行过程中可能受到风力干扰、电磁干扰等外部干扰,如何提高飞行器的抗干扰能力,保证其在复杂环境下的稳定飞行,是自主飞行器控制的重要难题。
3、实时性问题
自主飞行器的控制需要实时处理各种传感器数据,并快速做出决策,如何保证控制系统的实时性,提高飞行器的响应速度,是自主飞行器控制的又一难题。
自主飞行器控制难题的解决方案
针对自主飞行器控制过程中的难题,可以采取以下解决方案:
1、提高建模精度
为提高建模精度,可采用先进的建模方法,如神经网络、模糊逻辑等,可通过实验验证模型的有效性,对模型进行修正与优化。
2、增强抗干扰能力

为提高自主飞行器的抗干扰能力,可采用鲁棒控制、自适应控制等先进控制策略,可通过优化飞行器结构与设计,提高其自身抗干扰性能。
3、提高实时性
为提高控制系统的实时性,可采用优化算法、并行计算等技术,可选用高性能的处理器和传感器,提高数据处理速度。
案例分析
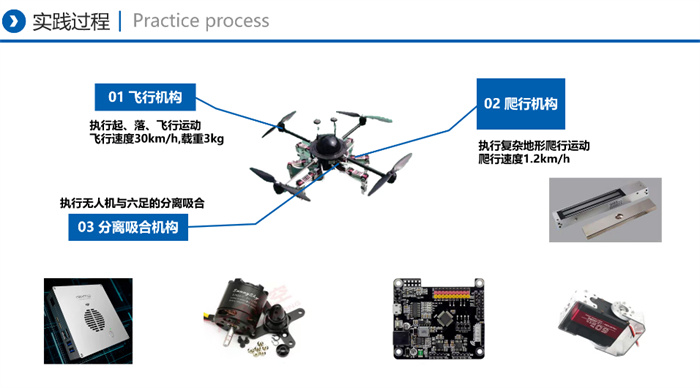
以某型无人机的设计为例,该无人机采用先进的控制系统,实现了自主导航、稳定飞行等功能,在设计中,针对建模精度问题,采用了神经网络建模方法,提高了模型的精度;针对抗干扰能力问题,采用了鲁棒控制策略,提高了无人机在复杂环境下的稳定性;针对实时性问题,选用了高性能的处理器和传感器,提高了数据处理速度,通过优化设计,该无人机取得了良好的性能表现。
自主飞行器的设计与控制是一个复杂的系统工程,面临诸多挑战,为提高自主飞行器的性能与安全性,需针对建模精度、抗干扰能力、实时性等控制难题进行深入研究,并采取相应的解决方案,随着科技的不断发展,自主飞行器将在更多领域得到应用,其设计与控制技术将不断完善与发展。
 京ICP备2020048212号-1
京ICP备2020048212号-1
还没有评论,来说两句吧...